A robot position.
More...
A robot position.
Definition at line 24 of file Pose.hpp.
#include <Pose.hpp>
|
|
double | O_ |
| | 0-orientation
|
| |
|
double | x_ |
| | x-position
|
| |
|
double | y_ |
| | y-position
|
| |
◆ Pose()
| cogip::cogip_defs::Pose::Pose |
( |
double |
x = 0.0, |
|
|
double |
y = 0.0, |
|
|
double |
O = 0.0 |
|
) |
| |
|
inline |
Constructor.
- Parameters
-
| [in] | x | [in] X coordinate |
| [in] | y | [in] Y coordinate |
| [in] | O | [in] 0-orientation |
Definition at line 27 of file Pose.hpp.
◆ operator==()
| bool cogip::cogip_defs::Pose::operator== |
( |
const Pose |
other | ) |
const |
|
inline |
Check if this pose is equal to another.
- Returns
- true if poses are equal, false otherwise
- Parameters
-
| [in] | other | [in] pose to compare |
Definition at line 54 of file Pose.hpp.
◆ pb_copy()
| void cogip::cogip_defs::Pose::pb_copy |
( |
PB_Pose & |
pose | ) |
const |
|
inline |
Copy data to Protobuf message.
- Parameters
-
| [out] | pose | [out] Protobuf message to fill |
Definition at line 59 of file Pose.hpp.
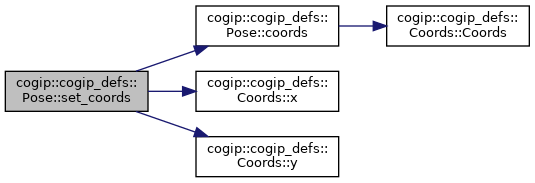
◆ set_coords()
| void cogip::cogip_defs::Pose::set_coords |
( |
const Coords & |
coords | ) |
|
|
inline |
Set coordinates.
- Parameters
-
| [in] | coords | [in] new coordinates |
Definition at line 40 of file Pose.hpp.
◆ set_O()
| void cogip::cogip_defs::Pose::set_O |
( |
double |
O | ) |
|
|
inline |
Set 0-orientation.
- Parameters
-
| [in] | O | [in] new 0-orientation |
Definition at line 48 of file Pose.hpp.
The documentation for this class was generated from the following file:
- lib/cogip_defs/include/cogip_defs/Pose.hpp
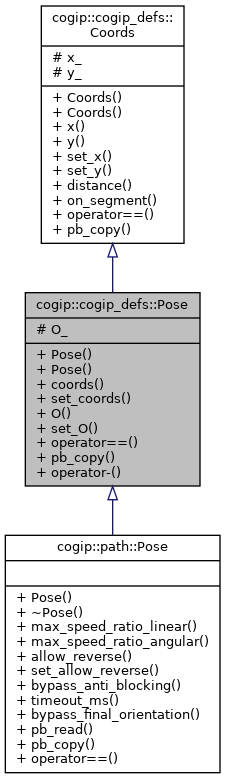
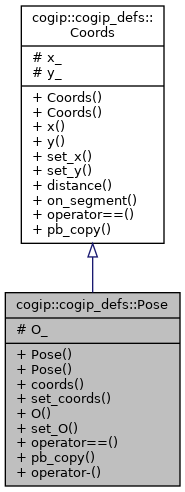
 Inheritance diagram for cogip::cogip_defs::Pose:
Inheritance diagram for cogip::cogip_defs::Pose: