cogip::path::Pose Class Reference
Position class as used in Path. More...
Detailed Description
#include <Pose.hpp>
 Inheritance diagram for cogip::path::Pose:
Inheritance diagram for cogip::path::Pose: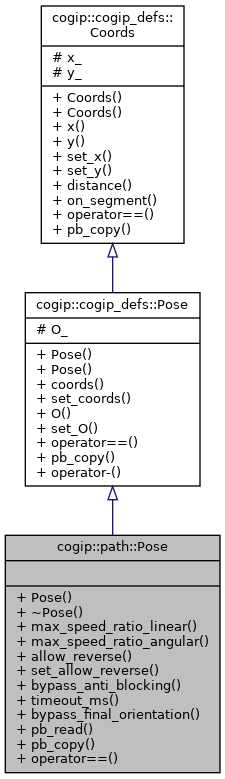 Collaboration diagram for cogip::path::Pose:
Collaboration diagram for cogip::path::Pose: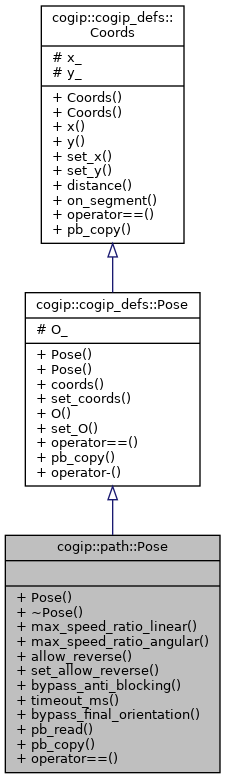
Public Member Functions | |
| Pose (double x=0.0, double y=0.0, double O=0.0, double max_speed_ratio_linear=0.0, double max_speed_ratio_angular=0.0, bool allow_reverse=true, bool bypass_antiblocking=false, uint32_t timeout_ms=0, bool bypass_final_orientation=false) | |
| Constuctor. More... | |
| virtual | ~Pose () |
| Destructor. | |
| virtual double | max_speed_ratio_linear () const |
| Return max speed linear. | |
| virtual double | max_speed_ratio_angular () const |
| Return max speed angular. | |
| virtual bool | allow_reverse () const |
| Is reverse mode allowed or not. | |
| virtual void | set_allow_reverse (bool enable) |
| Enable or disable reverse mode. More... | |
| virtual bool | bypass_anti_blocking () const |
| Return true if anti blocking should be bypassed. | |
| virtual uint32_t | timeout_ms () const |
| Return timeout to reach the pose, 0 if timeout should be disabled. | |
| virtual bool | bypass_final_orientation () const |
| Return true if final orientation should be bypassed. | |
| void | pb_read (const PB_PathPose &path_pose) |
| Initialize the object from a Protobuf message. More... | |
| void | pb_copy (PB_PathPose &path_pose) const |
| Copy object to a Probobuf message. More... | |
| bool | operator== (const Pose &other) |
| Override operator ==. | |
| Public Member Functions inherited from cogip::cogip_defs::Pose | |
| Pose (double x=0.0, double y=0.0, double O=0.0) | |
| Constructor. More... | |
| Pose (const PB_Pose &pose) | |
| Constructor from Protobuf class. | |
| Coords | coords (void) const |
| Return coordinates. | |
| void | set_coords (const Coords &coords) |
| Set coordinates. More... | |
| double | O (void) const |
| Return 0-orientation. | |
| void | set_O (double O) |
| Set 0-orientation. More... | |
| bool | operator== (const Pose other) const |
| Check if this pose is equal to another. More... | |
| void | pb_copy (PB_Pose &pose) const |
| Copy data to Protobuf message. More... | |
| Polar | operator- (const Pose &p) |
| Public Member Functions inherited from cogip::cogip_defs::Coords | |
| Coords (double x=0.0, double y=0.0) | |
| Constructor. More... | |
| Coords (const PB_Coords &coords) | |
| Constructor from Protobuf class. | |
| double | x (void) const |
| Return X coordinate. | |
| double | y (void) const |
| Return Y coordinate. | |
| void | set_x (double x) |
| Set X coordinate. More... | |
| void | set_y (double y) |
| Set Y coordinate. More... | |
| double | distance (const Coords &dest) const |
| Compute the distance the destination point. More... | |
| bool | on_segment (const Coords &a, const Coords &b) const |
| Check if this point is placed on a segment defined by two points A,B. More... | |
| bool | operator== (const Coords other) const |
| Check if this point is equal to another. More... | |
| void | pb_copy (PB_Coords &coords) const |
| Copy data to Protobuf message. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from cogip::cogip_defs::Pose | |
| double | O_ |
| 0-orientation | |
| Protected Attributes inherited from cogip::cogip_defs::Coords | |
| double | x_ |
| x-position | |
| double | y_ |
| y-position | |
Constructor & Destructor Documentation
◆ Pose()
| cogip::path::Pose::Pose | ( | double | x = 0.0, |
| double | y = 0.0, |
||
| double | O = 0.0, |
||
| double | max_speed_ratio_linear = 0.0, |
||
| double | max_speed_ratio_angular = 0.0, |
||
| bool | allow_reverse = true, |
||
| bool | bypass_antiblocking = false, |
||
| uint32_t | timeout_ms = 0, |
||
| bool | bypass_final_orientation = false |
||
| ) |
Constuctor.
- Parameters
-
[in] x [in] X coordinate [in] y [in] Y coodinate [in] O [in] 0-orientation [in] max_speed_ratio_linear [in] max speed linear [in] max_speed_ratio_angular [in] max speed angular [in] allow_reverse [in] reverse mode [in] bypass_antiblocking [in] bypass anti blocking [in] timeout_ms [in] move timeout [in] bypass_final_orientation [in] bypass final orientation
Member Function Documentation
◆ pb_copy()
| void cogip::path::Pose::pb_copy | ( | PB_PathPose & | path_pose | ) | const |
Copy object to a Probobuf message.
- Parameters
-
[out] path_pose [out] Protobuf message to fill
◆ pb_read()
| void cogip::path::Pose::pb_read | ( | const PB_PathPose & | path_pose | ) |
Initialize the object from a Protobuf message.
- Parameters
-
[in] path_pose [in] Protobuf message to read
◆ set_allow_reverse()
|
inlinevirtual |
The documentation for this class was generated from the following file:
- lib/path/include/path/Pose.hpp